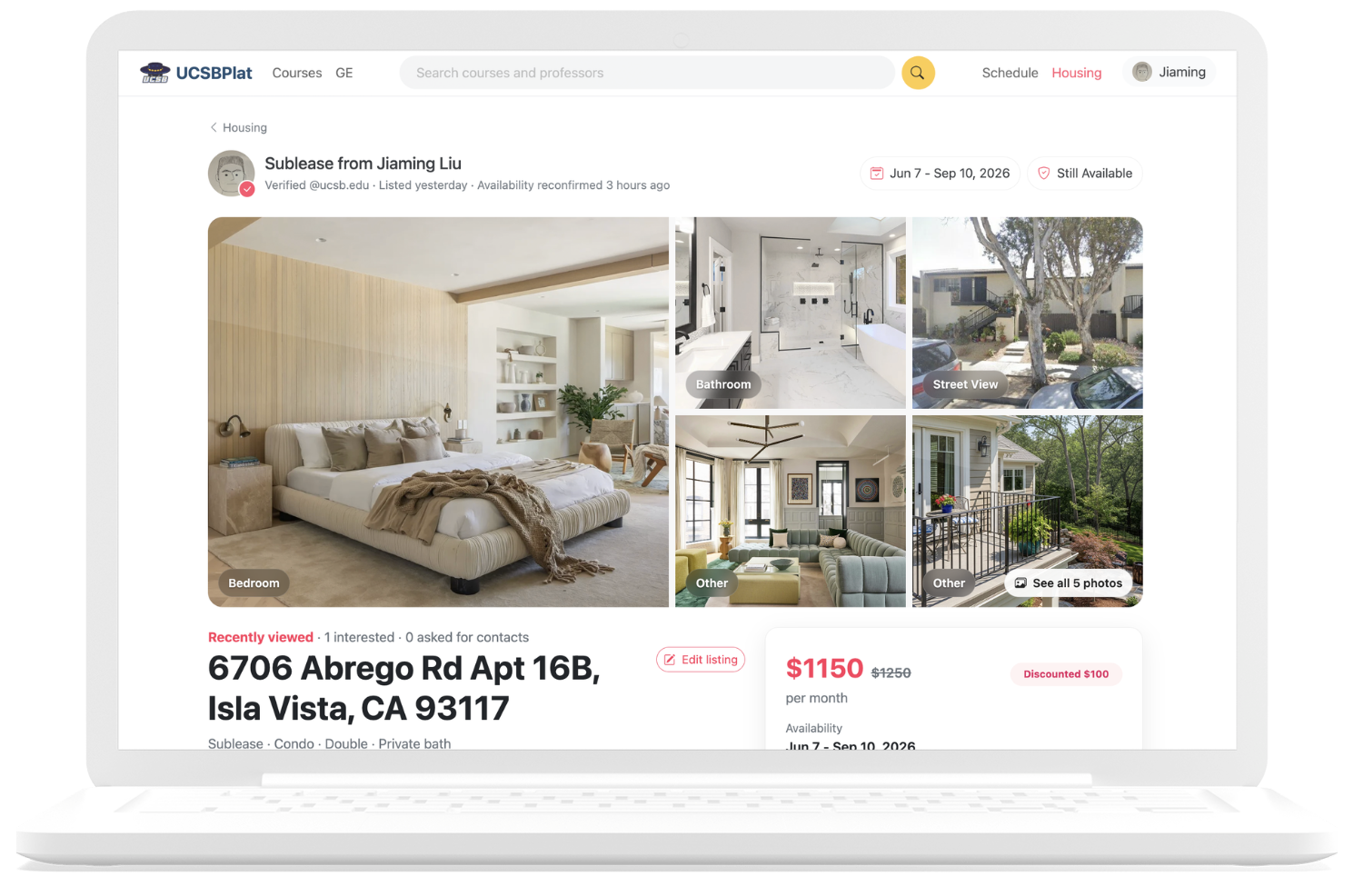
Post your subleases and lease takeovers
NEW on UCSBPlat.com
Create and browse lease takeovers and subleases posted by verified @ucsb.edu students. Get noticed by UCSBPlat's 9,200+ active users. Built by Gauchos for our Gauchos.
Dynamic modeling and control methods for robotic systems. Lagrangian method for deriving equations of motion, introduction to the Jacobian, and modeling and control of forces and contact dynamics at a robotic end effector. Laboratories encourage a problem-solving approach to control.
5
UnitsLetter
Grading1, 2, 3
PasstimeGraduate students only
Level LimitEngineering
College Hua Lee
2.8
Hua Lee
2.8
 Pradeep Sen
3.2
Pradeep Sen
3.2
 Andrew Teel
4.4
Andrew Teel
4.4