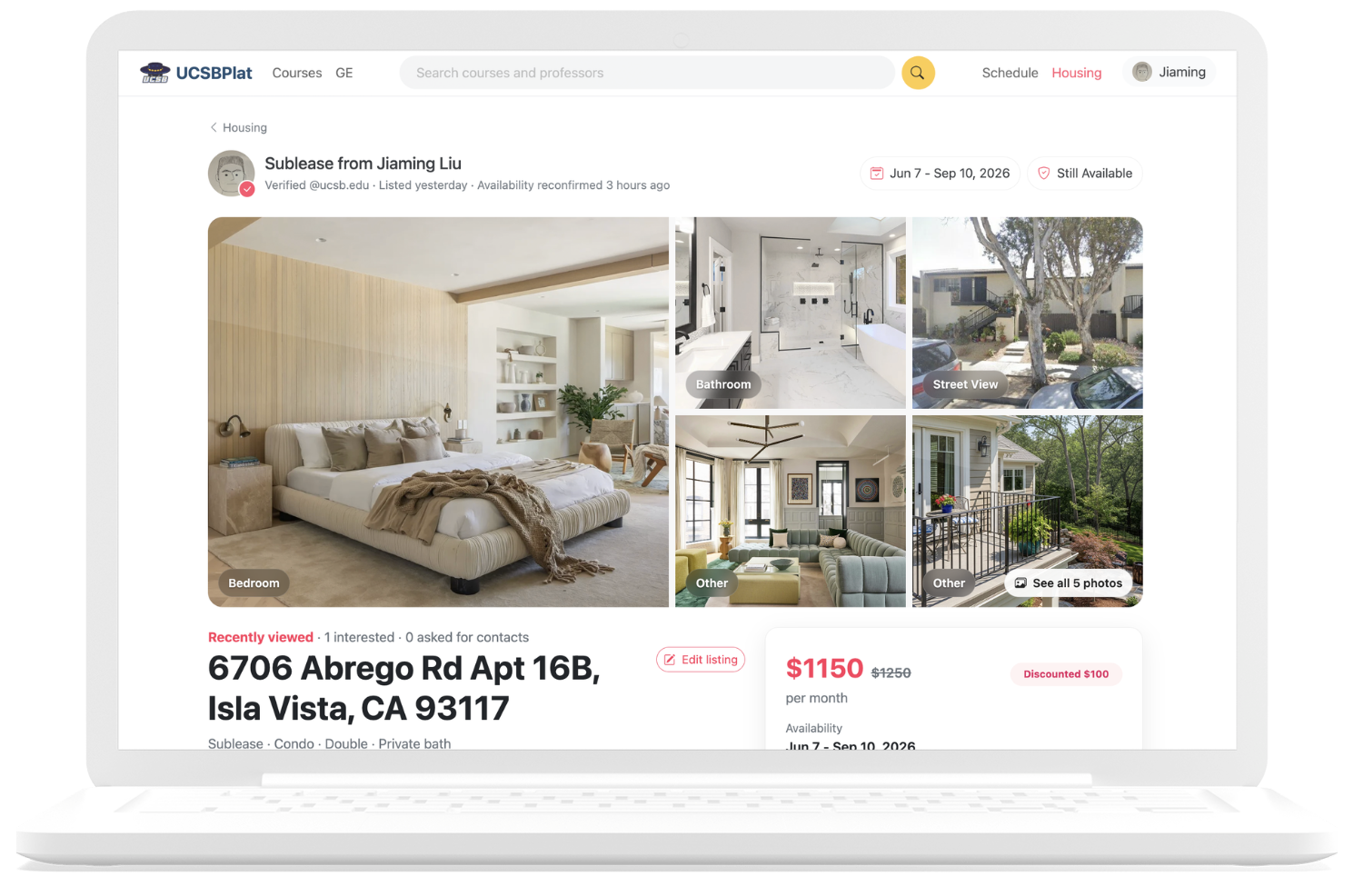
Post your subleases and lease takeovers
NEW on UCSBPlat.com
Create and browse lease takeovers and subleases posted by verified @ucsb.edu students. Get noticed by UCSBPlat's 9,200+ active users. Built by Gauchos for our Gauchos.
Learning from the versatility and robustness of bodies in nature, robotic devices are moving away from the traditional rigid form to designs that intentionally and carefully incorporate compliance. We explore this emerging paradigm of robots by 1) modeling the underlying mechanics of soft systems, such as soft actuators, sensors, and bodies, 2) examining current literature and gleaning design principles, and 3) designing and fabricating soft robotic devices in a hands-on laboratory setting. This course includes a final project; students are expected to design, model, fabricate, and test either a subcomponent or a full soft robot.
3
UnitsLetter
Grading1, 2, 3
PasstimeNone
Level LimitEngineering
College Ted Bennett
3.1
Ted Bennett
3.1
 Emilie Dressaire
4.8
Emilie Dressaire
4.8