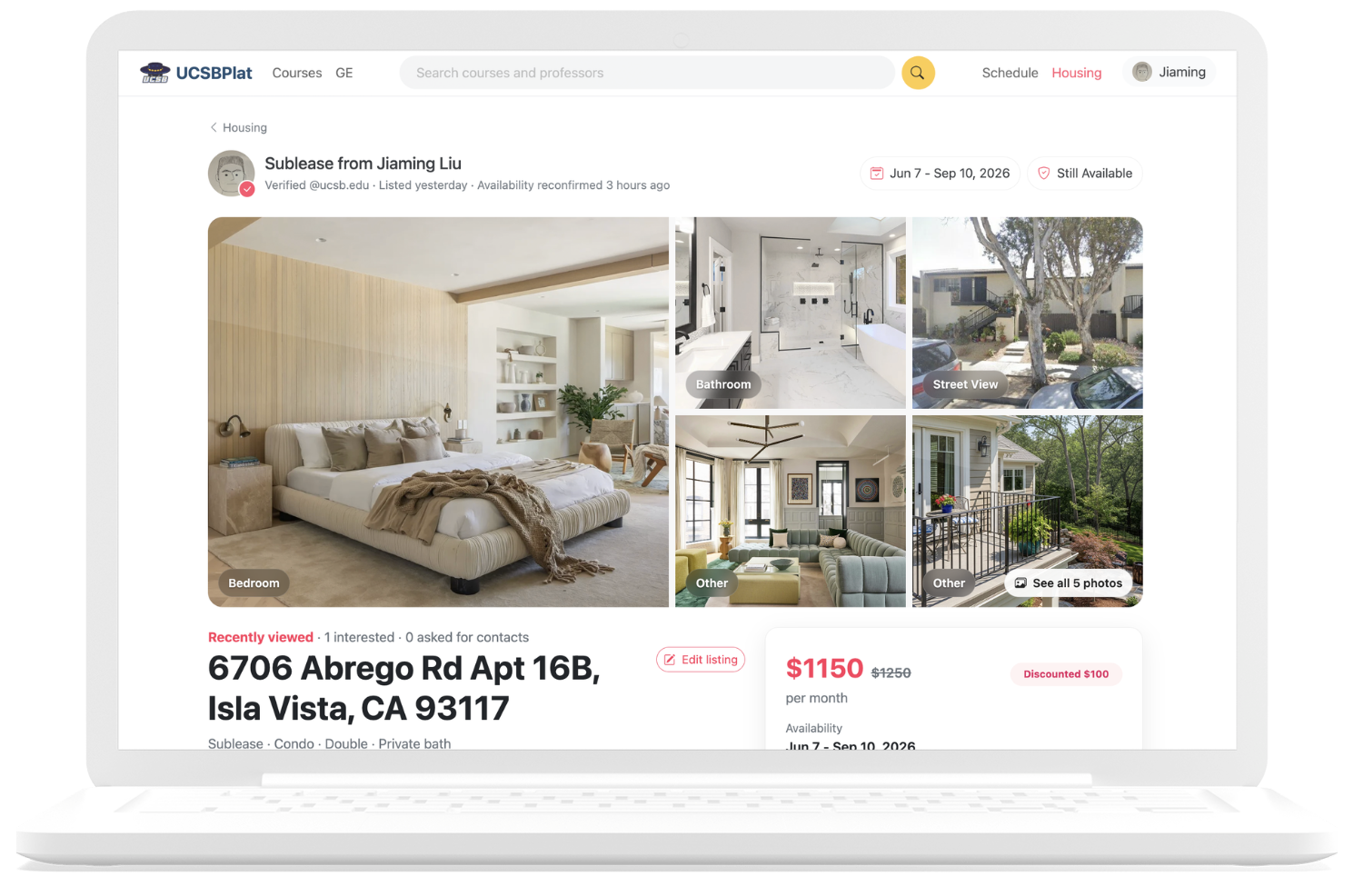
Post your subleases and lease takeovers
NEW on UCSBPlat.com
Create and browse lease takeovers and subleases posted by verified @ucsb.edu students. Get noticed by UCSBPlat's 9,200+ active users. Built by Gauchos for our Gauchos.
Internal and external descriptions. Solution of state equations. Controllability and observability realizations. Pole assignment, assignment, observers; modern compensator design. Disturbance localization and decoupling. Least-squares control. Least-squares estimation; Kalman filters; smoothing. The separation theorem; LQG compensator design. Computational considerations. Selected additional topics.
 Joao Hespanha
4.9
Joao Hespanha
4.9