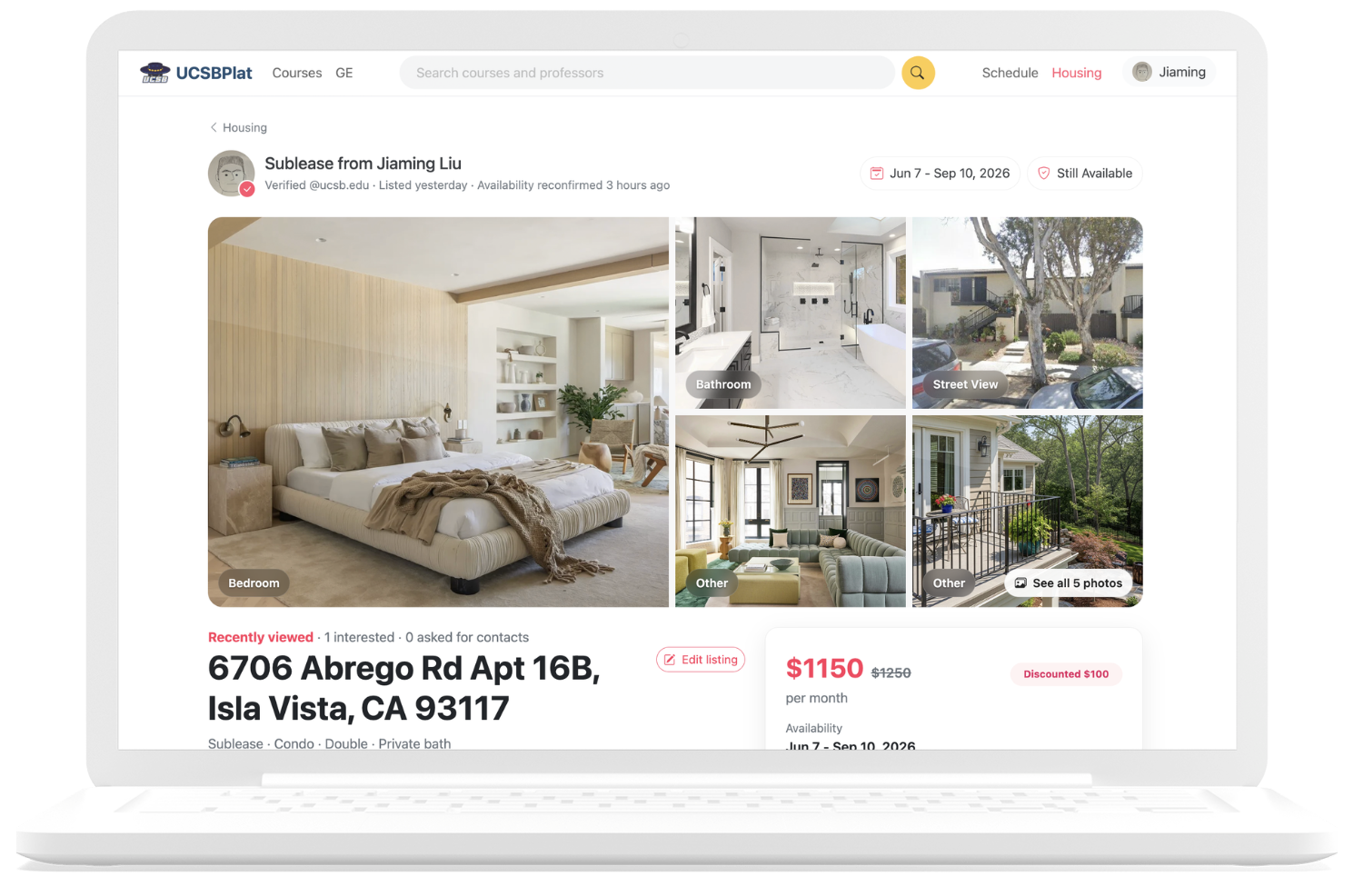
NEW on UCSBPlat.com
Create and browse lease takeovers and subleases posted by verified @ucsb.edu students. Get noticed by UCSBPlat's 9,200+ active users. Built by Gauchos for our Gauchos.